Zenmuse L2 High-Precision Aerial LiDAR SystemZenmuse L2 mengintegrasikan frame LiDAR, sistem IMU berakurasi tinggi yang dikembangkan sendiri, dan kamera pemetaan 4/3 CMOS RGB, memberikan platform penerbangan DJI akuisisi data geospasial yang lebih presisi, efisien, dan handal. Ketika menggunakan DJI Terra, dapat memberikan solusi siap pakai untuk pengumpulan data 3D dan juga pasca-pemrosesan dengan akurasi tinggi. 1 Presisi tinggi,Akurasi vertikal 4 cm, akurasi horizontal 5 cm. 2 Efisiensi yang exceptional,2,5 km2 tergapai dalam sekali terbang . 3 Penetrasi superior,Smaller laser spots, denser point clouds. 4 Detection Range,250 meter (reflektivitas 10%, 100 klx),450 meter (reflektivitas 50%, 0 klx). 5 5 Returns. 6 Turnkey Solution. 7 Point Cloud LiveView. 8 Pemrosesan DJI Terra sekali klik. Solusi LiDAR terintegrasi Berkat kinerja perangkat kerasnya yang kuat, L2 dapat memindai target kecil secara akurat, dan jangkauannya telah ditingkatkan untuk mendapatkan data point cloud yang akurat dengan cepat. Selama operasi, operator dapat melihat pratinjau, memutar, dan menyambungkan model cloud di lokasi, dan memperoleh laporan kualitas lapangan untuk melaksanakan tugas kerja secara efisien. Lakukan pasca-pemrosesan terpadu pada DJI Maps untuk mendapatkan hasil point cloud dengan presisi tinggi.
Presisi tinggi Mengintegrasikan GNSS dan navigasi inersia presisi tinggi yang dikembangkan sendiri, akurasi ketinggian bisa mencapai 4 cm dan akurasi pesawat bisa mencapai 5 cm.
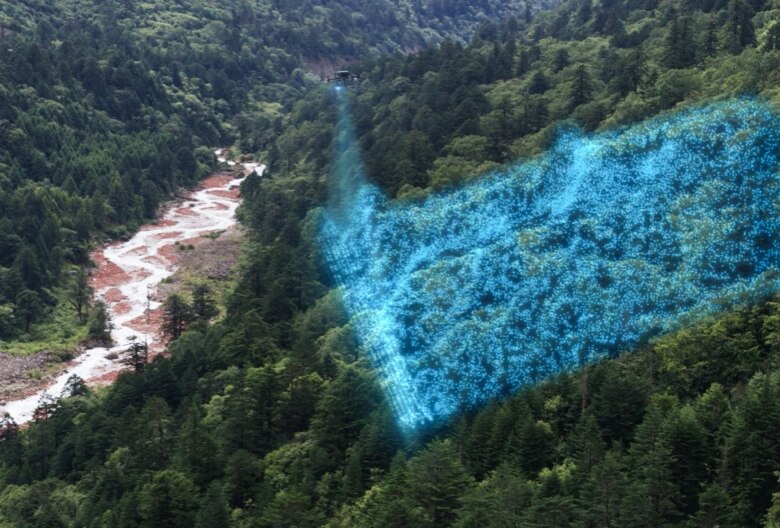
Efisiensi tinggi Bekerja segera setelah dinyalakan, dan dapat dengan cepat memperoleh data point cloud seluas 2,5 kilometer persegi dalam satu penerbangan.
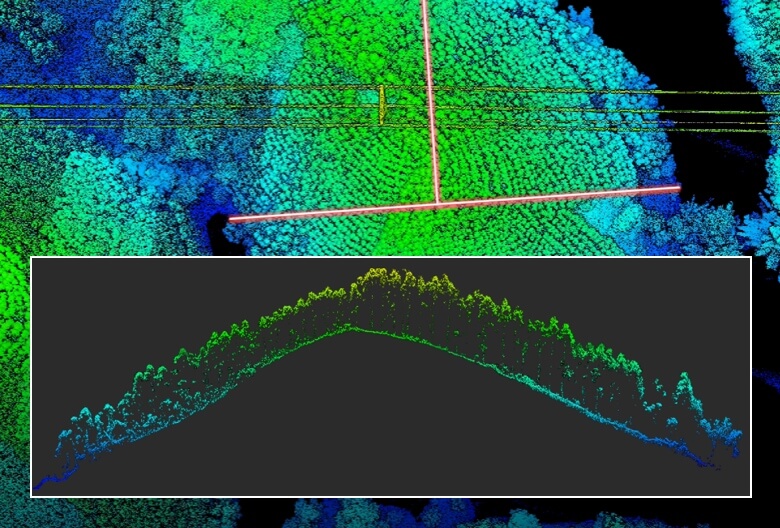
Mudah digunakan L2, Matrice 350 RTK, dan DJI Maps membentuk solusi terintegrasi yang mudah digunakan dan semakin menurunkan ambang batas pengoperasian. Frame-Based LiDAR Peningkatan Rentang deteksi 30% L2 memiliki jangkauan pengukuran 250 meter (reflektivitas 10%, 100 klx) [3], 450 meter (reflektivitas 50%, 0 klx) [3], dan ketinggian pengoperasian tipikal hingga 150 meter, yang semakin meningkatkan keselamatan operasional dan efisiensi. Titik cahaya lebih kecil dan energi yang lebih terkonsentrasi Ukuran titik cahaya adalah 4 × 12 cm @ 100 meter, yang hanya 1/5 dari L1. Ini tidak hanya dapat mengidentifikasi target yang lebih kecil dan mendapatkan model yang lebih detail, tetapi juga menembus vegetasi yang lebih padat dan menghasilkan informasi ketinggian digital yang lebih akurat (Digital Elevation Models). Mendukung 5 Pengembalian Di kawasan dengan vegetasi lebat, L2 memiliki akses ke lokasi tumbuhan bawah yang lebih kaya. Kecepatan data point cloud 240.000 poin/detik Dalam mode pengembalian tunggal dan multi-gema, emisivitas titik awan maksimum L2 dapat mencapai 240.000 titik/detik, sehingga memungkinkan lebih banyak data titik awan diperoleh per satuan waktu. Dua mode pemindaian L2 mendukung dua mode pemindaian, dan operator dapat memilih secara fleksibel sesuai dengan kebutuhan pekerjaan. Dalam mode pemindaian berulang, lidar dapat melakukan pemindaian yang lebih seragam dan presisi lebih tinggi untuk memenuhi persyaratan survei dan pemetaan presisi tinggi. Dalam mode pemindaian non-berulang, penetrasi lebih kuat dan lebih banyak informasi struktural dapat diperoleh, yang cocok untuk inspeksi listrik, survei kehutanan, dan skenario operasi lainnya. Desain Berbasis Bingkai Desain bingkai memungkinkan kecepatan data efektif point cloud mencapai 100%, dan dikombinasikan dengan gimbal tiga sumbu yang distabilkan, hal ini menghadirkan lebih banyak kemungkinan untuk skenario survei dan pemetaan. Sistem IMU dengan akurasi tinggi Akurasi yang ditingkatkan IMU presisi tinggi dapat melakukan penggabungan data dan pasca-pemrosesan dengan sistem penentuan posisi RTK pesawat untuk memberikan L2 informasi posisi absolut, kecepatan, dan sikap yang lebih akurat. Tidak hanya itu, kemampuan adaptasi lingkungan IMU telah ditingkatkan, sehingga membantu meningkatkan keandalan operasional L2. Yaw Accuracy Waktu nyata 0,2°, pasca-pemrosesan 0,05° Akurasi pitch and roll Waktu nyata 0,05°, pasca-pemrosesan 0,025° No IMU Warm-up Setelah dinyalakan, navigasi inersia tidak perlu dipanaskan terlebih dahulu, dan RTK pesawat berada dalam status FIX sebelum lepas landas, sehingga menghadirkan pengalaman pada lapangan yang lebih baik. RGB Mapping Camera
4/3 CMOS, Mechanical Shutter Ukuran piksel telah ditingkatkan menjadi 3,3 μm, dan piksel efektif telah mencapai 20 MP. Efek pencitraan keseluruhan lebih baik, dan detail pewarnaan point cloud lebih kaya. Interval foto minimum dikurangi menjadi 0,7 detik, dan mendukung rana mekanis dengan masa pakai rana hingga 200.000 kali, sehingga semakin mengurangi biaya pengoperasian. Ketika tidak perlu mengumpulkan titik awan, kamera cahaya tampak tidak hanya dapat mengambil gambar dan video, tetapi juga mengumpulkan gambar untuk pemetaan cahaya tampak. |




|
|